
Bio
Hi there, I am Jingwen YU (中文名:于靖文), a Ph.D. candidate at Cheng Kar-Shun Robotics Institute (CKSRI), Hong Kong University of Science and Technology (HKUST) and affiliated with Shenzhen Key Laboratory of Robotics and Computer Vision Lab at Southern University of Science and Technology (SUSTech). I am co-supervised by Prof. Ping TAN and Chair Prof. Hong ZHANG (SUSTech). I work closely with Dr. Jianhao JIAO, Dr. Hengli WANG, Mr. Hanjing YE, and Mr. Chao TANG. I was with the Intelligent Autonomous Driving Center (IADC) and RAM-Lab, led by Prof. Ming LIU, where I got the chance to work on autonomous vehicles and quadruped robots. Besides, I am also interested in task-oriented grasping, check out the projects section for more details. I earned my B.Eng. of Information Engineering from Dept. of Electronic and Electrical Engineering under advising from Chair Prof. Hong Zhang and Prof. Yajun Yu.
Now, I teach robots to locate themselves in changing environments, focusing on:
- Visual Place Recognition / Loop Closure Detection
- Visual Localization and Image Matching
- Visual SLAM
Reach out if you are interested in my research!
News
Sept/2024: 🎉🎉🎉 FusionPortableV2 is accepted to IJRR!!
Jul/2024 : 🎉 Jiayi Yang (杨佳怡) and Yongqi Shi (施永祺) graduated from SUSTech and will be going to UTokyo and Duke University. They completed their final-year projects on loop closure verification with me.
Jun/2024 : 🎉 A paper “GV-Bench: Benchmarking Local Feature Matching for Geometric Verification of Long-term Loop Closure Detection” is accepted to IROS 2024. Arxiv, Code.
Apr/2024 : 🎉 Our dataset FusionPortableV2 is released on arxiv! Check out our website see how can FPV2 boost your research toward Generalized SLAM.
Selected Publication:
Full publication list is available on google scholar.
Verification of Loop Closure Detection / Place Recognition
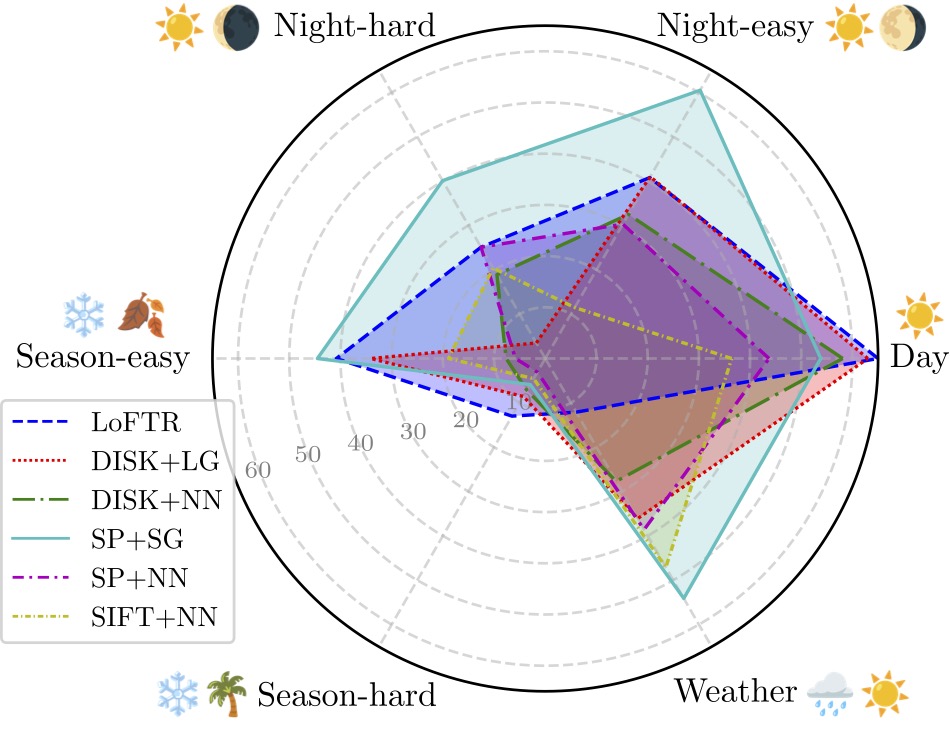 | Jingwen Yu, Hanjing Ye, Jianhao Jiao, Ping Tan, Hong Zhang IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024.  |
Multi-Sensor Fusion SLAM
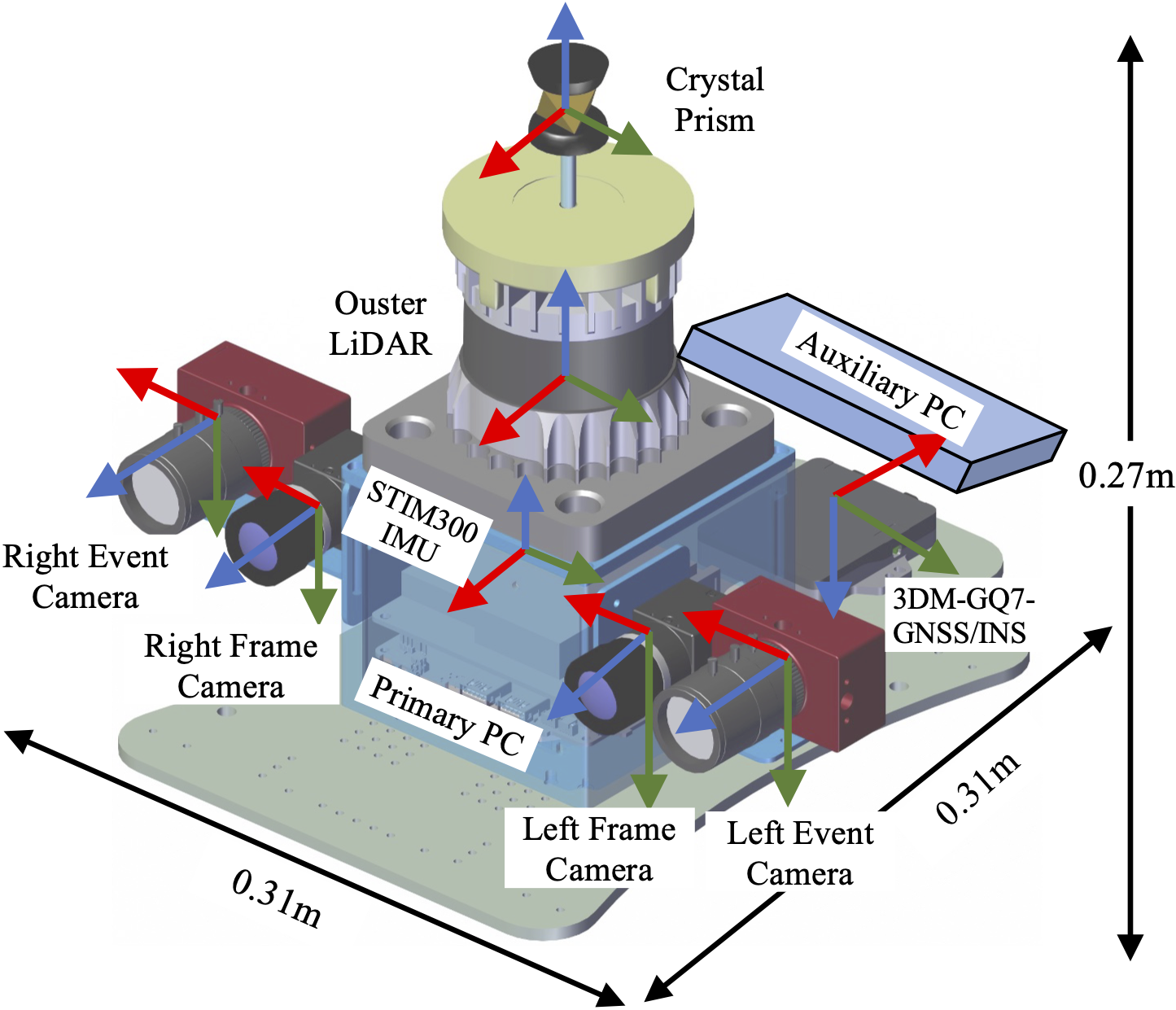 | Hexiang Wei, Jianhao Jiao, Xiangcheng Hu, Jingwen Yu, Xupeng Xie, Jin Wu, Yilong Zhu, Yuxuan Liu, Lujia Wang, Ming Liu International Journal of Robotics Research  |
Task-Oriented Grasping
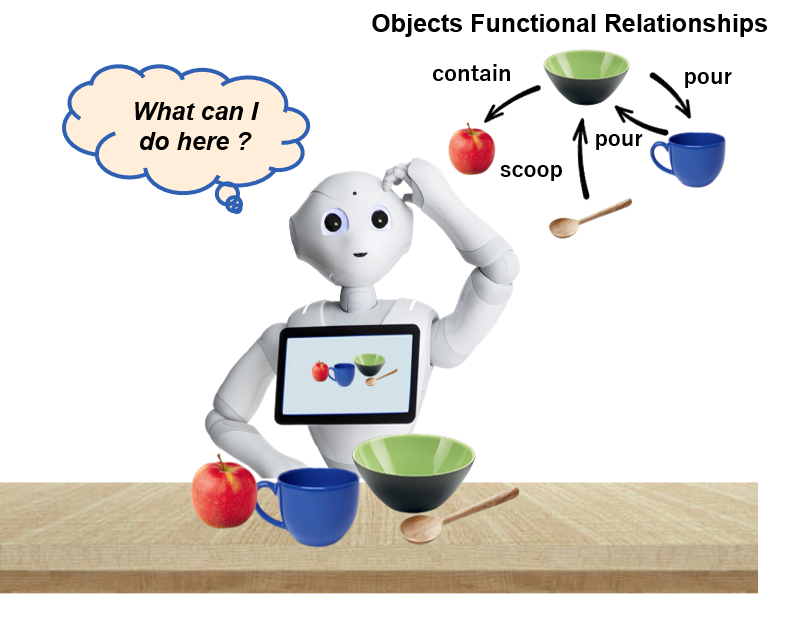 | Chao Tang, Jingwen Yu, Weinan Chen, Bingyi Xia, Hong Zhang IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022. |
Education
- Hong Kong University of Science and Technology, Sept, 2021-present
- Ph.D. Candidate in Electronic and Computer Engineering
- Southern University of Science and Technology, Sept, 2017- Jun, 2021
- B.Eng. in Electronic and Electrical Engineering (with Magna Cum Laude)
- National Scholarship of China (0.2% Nationwide)
- National University of Singapore, Jun, 2019 - Aug, 2019 (Visiting Student)
- High School Attached To Shandong Normal University, Sept, 2014 - Jun, 2017
Academic Services
- IEEE TASE Reviewer
- IEEE ICRA 2024 Reviewer
- IEEE/RSJ IROS 2024 Reviewer
- IEEE Intelligent Vehicles Symposium 2022, 2023 Reviewer
- IEEE ICRA 2021 Organizing Committee & Outstanding Volunteer
- MICCAI 2018 Volunteer
Teaching
I have always enjoyed teaching since my undergraduate.
- Graduate Teaching Assistant, HKUST, 2022-2023
- ELEC3120 Computer Communication Network
- Undergraduate Teaching Assistant, SUSTech, 2020-2021
- EE346 Mobile Robot Navigation